
滚珠丝杠是将回转运动转化为直线运动,或将直线运动转化为回转运动的理想的产品,滚珠丝杠由于摩擦阻力小,效率高、精度高,被广泛地用于工业设备和精密仪器中。
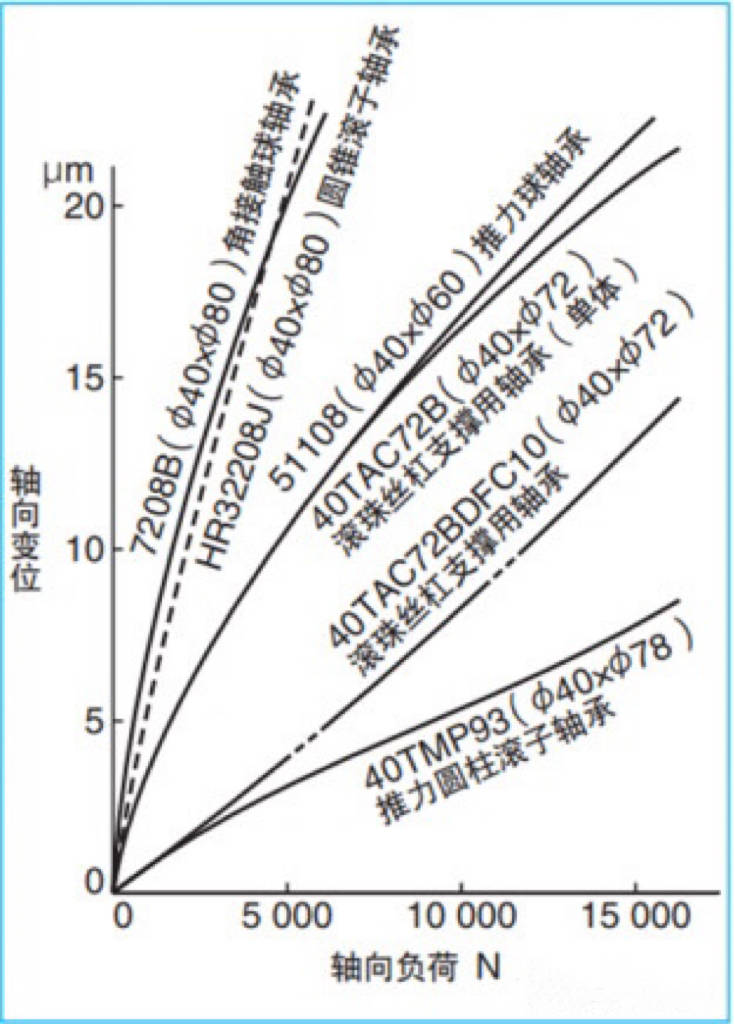
由于丝杠在工作过程中主要承受轴向力,轴向力的大小和滚珠丝杠的轴向刚度,对丝杠的重复定位精度影响较大,影响丝杠轴向刚度的因素有很多,主要包括:丝杠的轴向刚度、丝杠支撑轴承的轴向刚度、滚珠螺母的轴向刚度、丝杠轴承座的轴向刚度等。这里主要讨论丝杠支撑轴承和丝杠的轴向刚度。各种轴承的轴向刚度对比尺寸相当推力轴承的轴向刚度大约是角接触球轴承和圆锥滚子轴承轴向刚度的两倍,推力圆柱滚子轴承的轴向刚度最大,丝杠支撑用轴承的轴向刚度介于圆锥滚子轴承和推力圆柱滚子轴承中间。轴向刚度大也意味着启动扭矩较大。
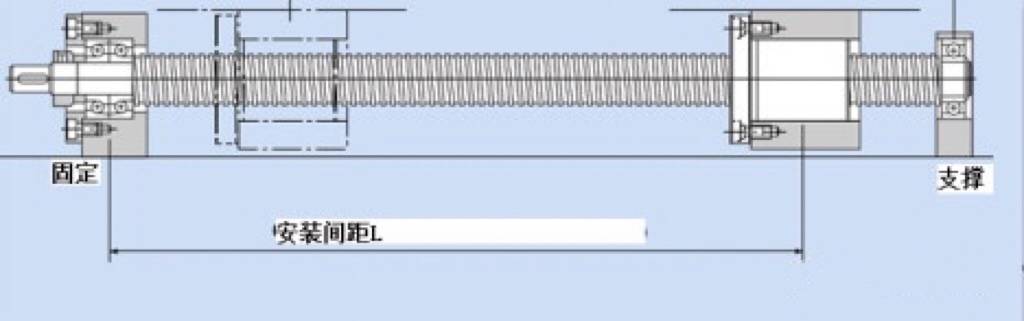
丝杠的支撑方式及对轴向刚度的影响丝杠的支撑方式及刚度的影响:一般情况下丝杠驱动端选择固定支撑结构,这样可以减少或消除丝杠与驱动元件连接处不对中(轴向不对中、角度不对中、平行不对中)对丝杠定位精度的影响。下面就以具体的实例看看相同的丝杠用不同的支撑方法对轴向刚度的影响。数控铣床进给机构用滚珠丝杠,平均载荷Fa=3000N,选用CM5006-5滚珠丝杠,丝杠长度L=1.0m.试计算丝杠在不同支撑条件下轴向刚度对精度的影响。Ks=丝杠轴轴向刚度(KN/μm)d1=45.2mm丝杠底径(mm)L0=1000mm 丝杠长度L1=68mm 螺母安装尺寸E=2.06*10^5MPa(丝杠弹性模量)As=丝杠有效截面积(mm^2)这里分析在距固定端100mm 到800mm范围内工作时丝杠轴向刚度对定位精度的影响。固定----自由 支撑方式这种结构,适用于定位精度要求不高,丝杠转速较低且滚珠螺母不受或受很小的径向力的工况下。


固定----简支 支撑方式这种结构,适用于定位精度要求太高,承受径向力较小的工况,由于另一端有简支支撑,临界转速高于固定--自由支撑方式。
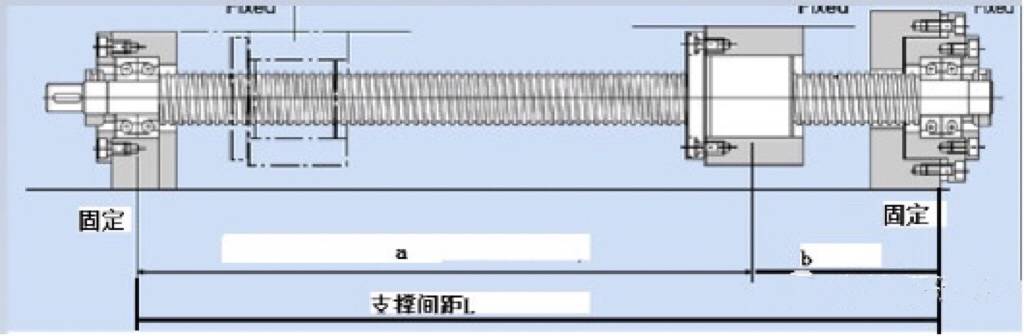
由于简支支撑可以沿轴向方向在小范围内滑动,因此这种支撑方式对轴向刚度的影响和固定--自由支撑方式一样。固定----固定 支撑结构这种支撑方式轴向刚度大,重复定位精度高,可以承受较大的径向载荷,通常情况下这种结构还要对丝杠施加一定的预拉力,这样丝杠承受径向载荷的能力大大提高,并且在温度升高的情况下,丝杠还能保持一定的预拉力,这样即使有温度变化,温度的变化也不会对丝杠长度产生影响,只是会改变丝杠内部应力的大小。
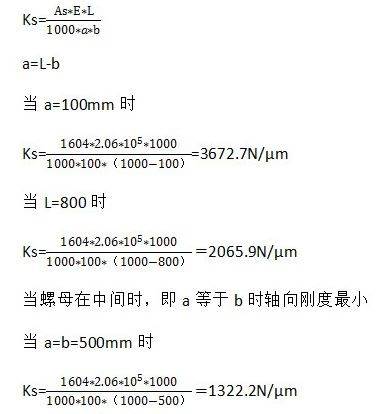
丝杠轴向刚度计算:
计算不同情况下由于轴向刚度产生的轴向位移量:
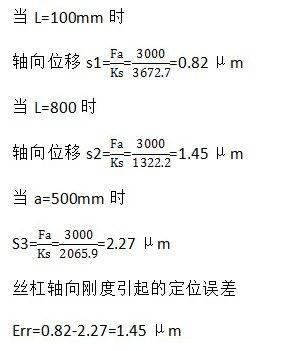
在本例中丝杠轴向刚度对定位精度的影响如下:



