
适当的润滑对于保持轴承的性能和寿命至关重要。它可以避免轴承过热、腐蚀、磨损等问题。在对轴承进行润滑之前,必须根据工作速度、温度和负荷等因素确定正确的润滑剂类型。使用润滑剂的过程中,应遵循制造商的建议,确保适量,因为过度润滑或润滑不足都会导致过早的轴承故障。另外,润滑剂供给的时间间隔应根据条件来决定。润滑剂的正确应用可以帮助防止金属与金属之间的接触,减少摩擦,并延长轴承的寿命。
一、选择合适的润滑剂
为特定应用选择最合适的轴承润滑剂时需要考虑多个因素,这些因素包括轴承类型、尺寸、温度、负荷条件、转速、操作环境等方面。以下是润滑剂选择时需要遵循的步骤。

明确轴承类型。不同类型的轴承对润滑都有特定的要求。如球轴承、滚子轴承、滑动轴承对润滑剂选择及润滑方法存在差异。
确定工作温度范围。润滑剂在一定温度范围内保持其特性的能力对其有效性至关重要。考虑应用的最低和最高工作温度,并选择能够承受这些温度并保持足够润滑的润滑剂。温度也会影响润滑剂的流动能力,因此要考虑轴承的设计和润滑剂的黏度。
计算负荷。合适的润滑剂必须足以支持轴承的负荷,确保轴承不会遭受过度的机械磨损。计算轴承的负荷,选择具有合适承载能力的润滑剂。如调心滚子轴承和圆锥滚子轴承等类型的轴承就需要具备高承载能力的润滑剂。
确定运行转速。轴承的运行速度将影响润滑要求。高速应用需要黏度低的润滑剂,而低速应用则需要黏度稍大的润滑剂。可以结合应用的速度,选择黏度适合该轴承类型的润滑剂。
考虑环境。轴承的工作环境也会影响润滑要求。灰尘、污垢、水分和化学品都会影响润滑剂的性能。可以结合具体的应用环境,选择一种能够承受这些条件的润滑剂。例如,密封轴承可能需要与开放式轴承不同的润滑剂。
另外,对于油润滑而言,除上述因素之外,黏度也是选择油润滑剂的关键考虑因素。它们直接影响到润滑的有效性和耐久性。润滑剂的粘度影响其在轴承表面流动和粘附的能力,以及在轴承和其配合表面之间保持润滑膜的能力。
对于脂润滑而言,除了上述列举的因素之外,基础油粘度和硬度是选择润滑脂时需要考虑的关键特性,选择适当的基础油粘度和硬度将有助于延长轴承的使用寿命,减少停机时间,并最大限度地降低维护成本。
二、保证最佳润滑剂量
无论是油润滑还是脂润滑,润滑剂的使用量会直接影响到最大工作速度以及噪音水平等等。过度润滑和润滑不足都不利于轴承的正常运行。过度润滑会增加轴承内部产生不必要的热量。如果润滑量不足,则会导致滚动体与沟道面的机械磨损。采用适量的润滑剂可以确保所有接触面都能接受均匀的润滑。
一般来说,对深沟球轴承而言,脂润滑剂的填充量约占轴承空间容积的30%左右。这也会因具体结构和壳体内部空间及产品的应用工况的差异而有所区别。润滑实践证明,正确的润滑剂数量可由运行速度、设计、空间容积以及轴承的密封或外部防护程度决定。
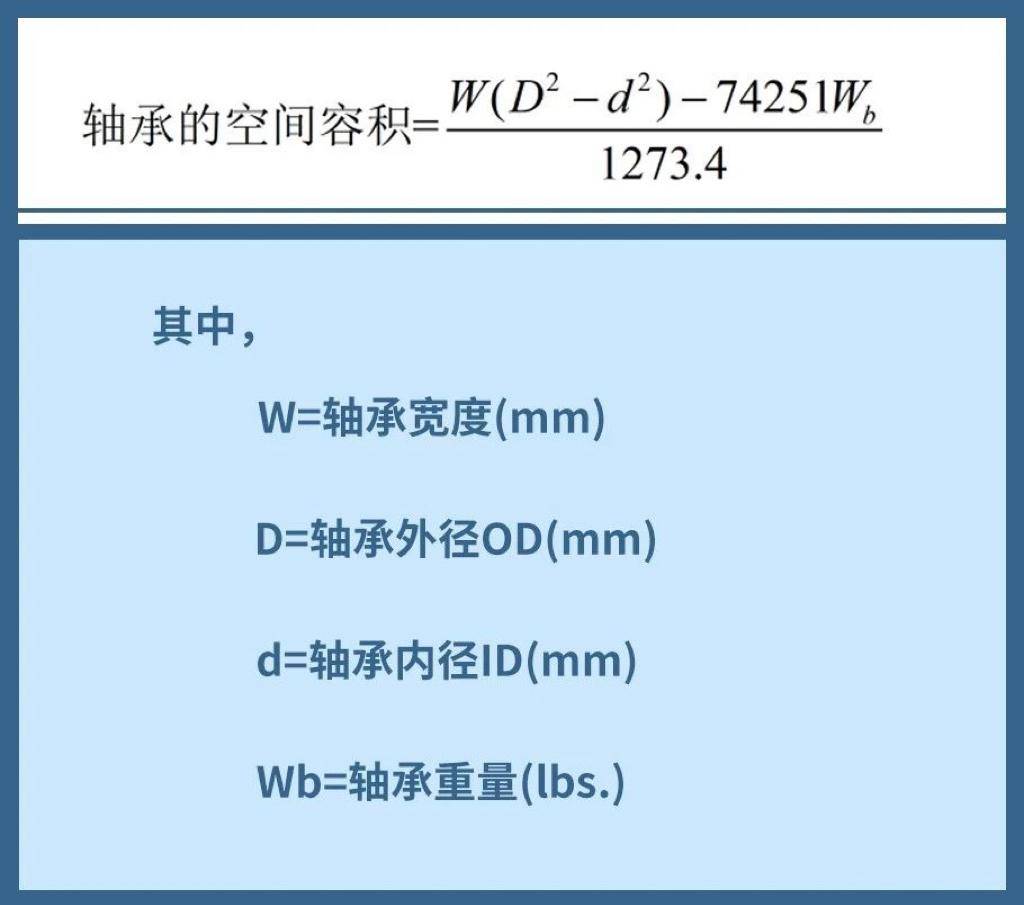
空间容积的计算取决于轴承的类型、尺寸和内部设计。制造商一般会给出的轴承目录及空间容积表,根据滚动体和轴承内外圈之间的间隙等相关数据来计算特定轴承的空间容积。
也可以采用“经验法则方程”,这种方法对低速运行或有可用润滑油腔的应用效果最好,因为它们不需要对自由空间进行极其精确的测量。
三、润滑前、中、后的准备与有效跑合
需要客户自行添加油脂的轴承,需要在添加油脂前进行清洁,因为轴承表面的灰尘、水、油或油脂以及防腐蚀涂层等杂质会损坏轴承的性能并降低润滑剂的有效性。在清洗轴承表面时,一定要使用非残留性溶剂,以提供最佳的润滑条件。
对于速度、预紧力和润滑剂量有特别要求时,正确的跑合程序是必要的。它可以确保沟道有适量的润滑剂保证轴承有充足的润滑,从而更好地维持轴承正常运转。
四、避免常犯的错误
不当的轴承润滑危害至深,它会引发一系列的轴承失效问题,导致停机及不必要的成本浪费。规避如下一些常见的润滑错误,能够延长轴承使用寿命。


